杂谈:拉普拉斯矩阵和代数连通度
拉普拉斯矩阵
首先考虑图的关联矩阵(incidence matrix),。其中每一列表示的是图的节点,每一行表示的图的一条边。
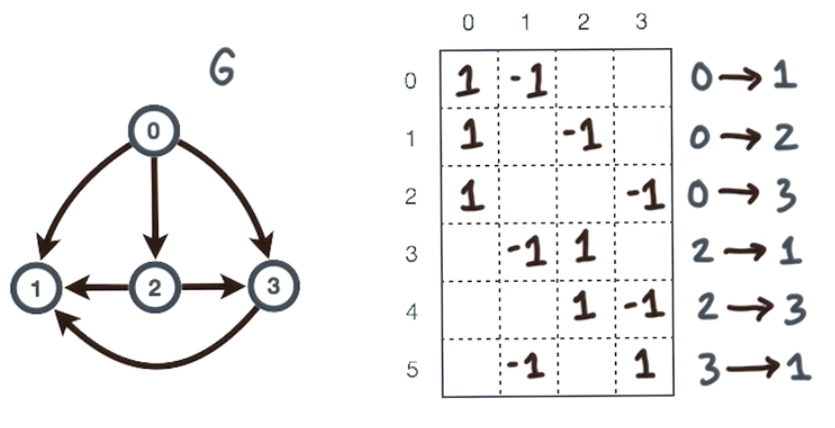
然后我们将这个关联矩阵可以写成:
其中,是一个边向量,表达了从节点 i 到节点 j 的一条边,其余位置都为 0。所以:
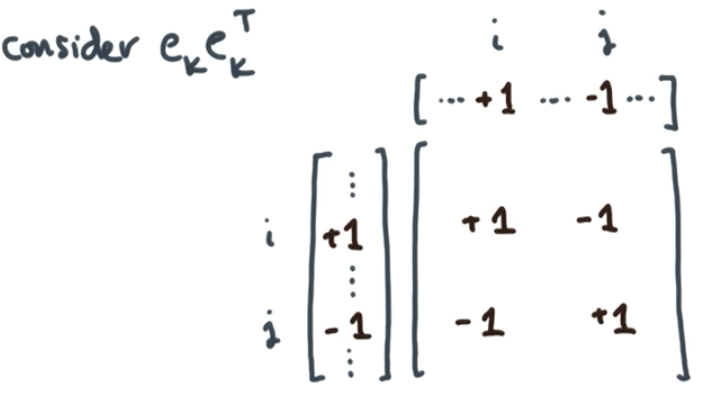
考虑上方这个矩阵,我们会发现它的对角线上,这个位置和这个位置,会都为 1,其实表达了在该图中,节点 i 和 j 位置的度数为 1。而其余两个位置和则表达了该位置存在一条边。此时,该矩阵损失了方向信息。
当对这一系列矩阵求和,我们就得到了图的拉普拉斯矩阵,对角线表达了节点的度数,而非对角线部分则是边的信息。
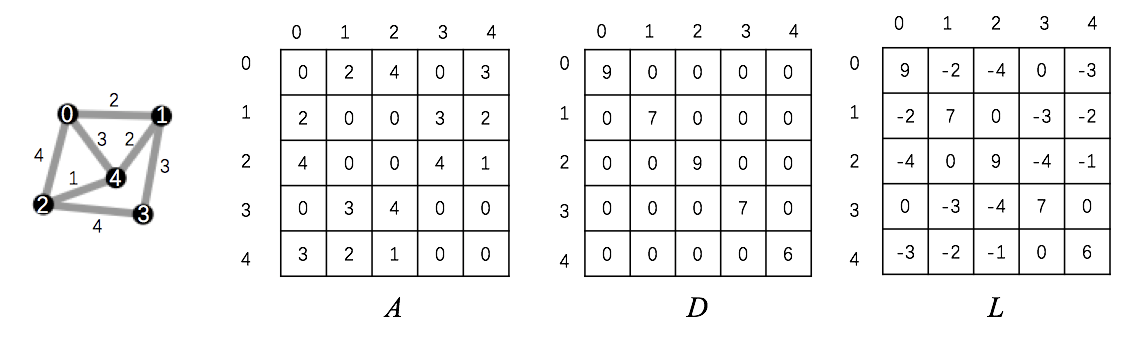
当然,在有权图中,上面的关联矩阵,就不应该表示成 1 和-1,而应该是边的权重的平方根。
那么,拉普拉斯矩阵就可以定义成:
假设一个无向正权图,其邻接矩阵表示成,每个元素代表边的权重。其度矩阵表示成,是一个对角矩阵,对角线的元素则是每个节点所带的连接边的权重和(),这里不考虑自环。那么拉普拉斯矩阵(Laplacian)就是。
弹簧模型
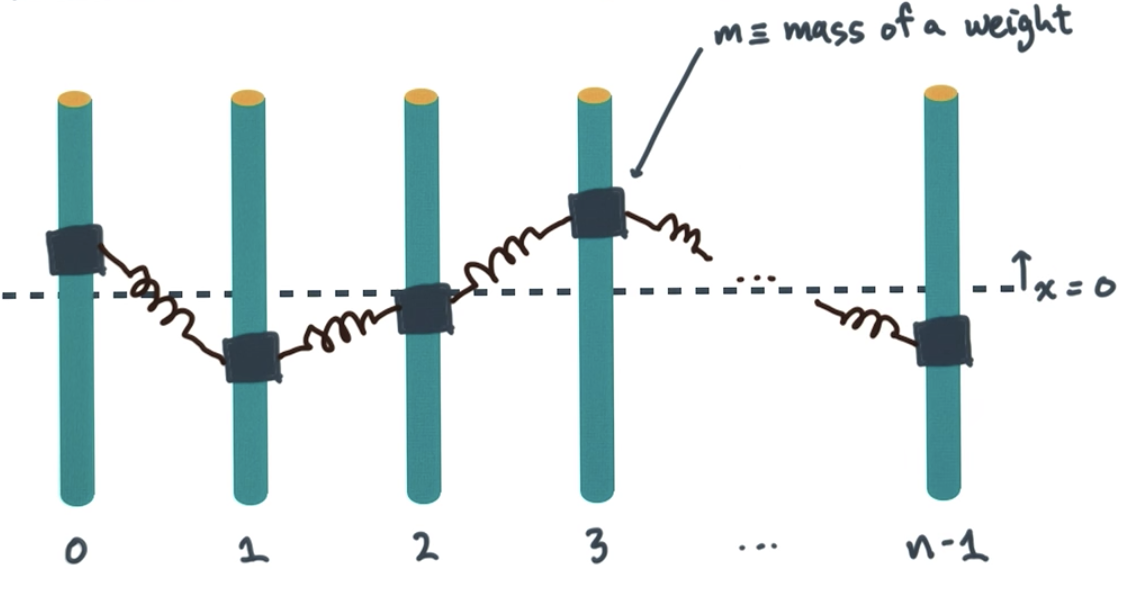
首先,假设一组固定的杆子,他们上面套上了一些可以滑动的滑块,这些滑块的质量都是,滑块之间互相用弹簧链接。
当某个滑块上升到的位置时,该滑块受到的弹簧拉力应该是:。根据牛顿第一定律,滑块受到的拉力又应该是
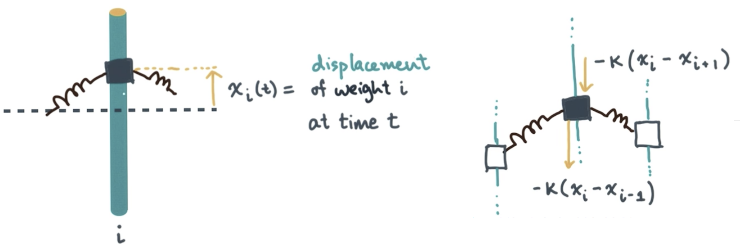
将所有滑块在时刻的位置写成向量形式:
那么,拉力可以被写成:
该矩阵是一个列的矩阵,该矩阵就可以被看做一个个点互相连接的单链条的图的拉普拉斯矩阵:

最终每个点的位置,会呈现出一种正弦波的变化趋势,事实上,这个变化趋势是由多个正弦或者余弦波的叠加组成,也就是可以通过傅里叶变化,转换为频域上的模式,每一种模式和该拉普拉斯矩阵的特征向量所给定。
代数连通性
首先介绍一些拉普拉斯矩阵的特性:
拉普拉斯矩阵是对称的。
拉普拉斯矩阵的特征值都是实数并且非负的,而且对应的特征向量都是实数并且正交的。按照惯例,会对这些特征值进行排序:
如果有个连通子图,当且仅当:
(这一点也说明了,拉普拉斯矩阵的特征值和图的连通性有一定关联)
对于一个有个点的图,将该图分成正负两部分。
 记:
记:那么,连通+-两部分的那些切割边的数量,则可以用表示。
Courant minimax principle
承接上一节,假如需要最小化正负两部分的切割边,则我们需要
定理:给定任意实向量,对进行标准化,使得,且
那么,使得最小的满足以下条件:
其中,和是拉普拉斯矩阵的第二个特征向量和对应的特征值。
于是,的任意一种二分切割方法,最小只能切割出条切割边。
假如,我们要找到,拥有最小切割边的分割方式,我们可以:
创建的拉普拉斯矩阵
计算该矩阵的第二个特征向量
用该特征向量的正负来表达,就能得到想要的分割方式。也即: